Apex 5" HD on base frame kit¶
A digital HD build on the Apex Base Frame Kit¶
 For my first DIY build ever I wanted a strong 5" frame.
For my first DIY build ever I wanted a strong 5" frame.
I chose the ImpulseRC Apex Base Frame Kit because I did not want to rely on a HD specific frame and loose the space made for the DJI Air Unit.
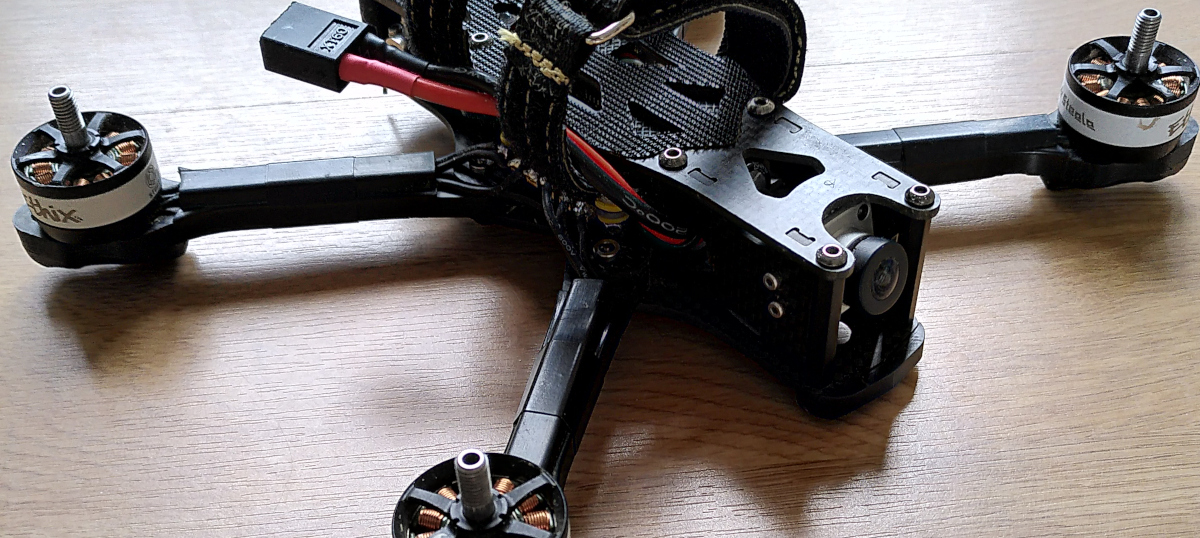
It was quite a challenge to get everything to fit properly but I love the result and I hope you'll appreciate the density and great balance of this build.
This ends up as a compact (but not too much) build without sacrificing the space for the electronics. It is clean (to my standards at least) and very powerful.
I enjoyed working on it very much and I hope you'll get a sense of it reading this build guide. Enjoy!
Hardware list¶
Note
Those links are NOT affiliate links. I just share the links where I actually bought the stuff needed for this build.
- ImpulseRC Apex Base Frame Kit
- T-Motor Combo F7 HD FC + F55A PRO II
- TBS Motor Steele Ethix Stout V3
- TBS Tracer Nano RX
- Caddx Vista HD System (see improvement notes below)
- Apex HD CAMERA SIDE PLATE KIT (see improvement notes below)
- 20cm Coaxial Cable for Caddx Vista (20cm !)
- Vifly Finder Mini - Buzzer (lightweight)
- XT60 14AWG 10cm cable (longer)
- Apex DJI antenna TPU holder (will fit tracer immortal-t)
- HQProp ETHIX P3 Peanut Butter & Jelly 5.1x3x3 - PC (2x CW + 2xCCW)
- TrueRC Singularity U.FL Lite 112mm 5.8GHz - LHCP
- Strap Lipo KEVLAR 240x16mm - DFR
Notes to self for future improvements¶
- Switch to the Caddx Nebula Pro Vista Kit so we do not need the Apex HD CAMERA SIDE PLATE KIT any more, save 3 grams and money?
Build steps¶
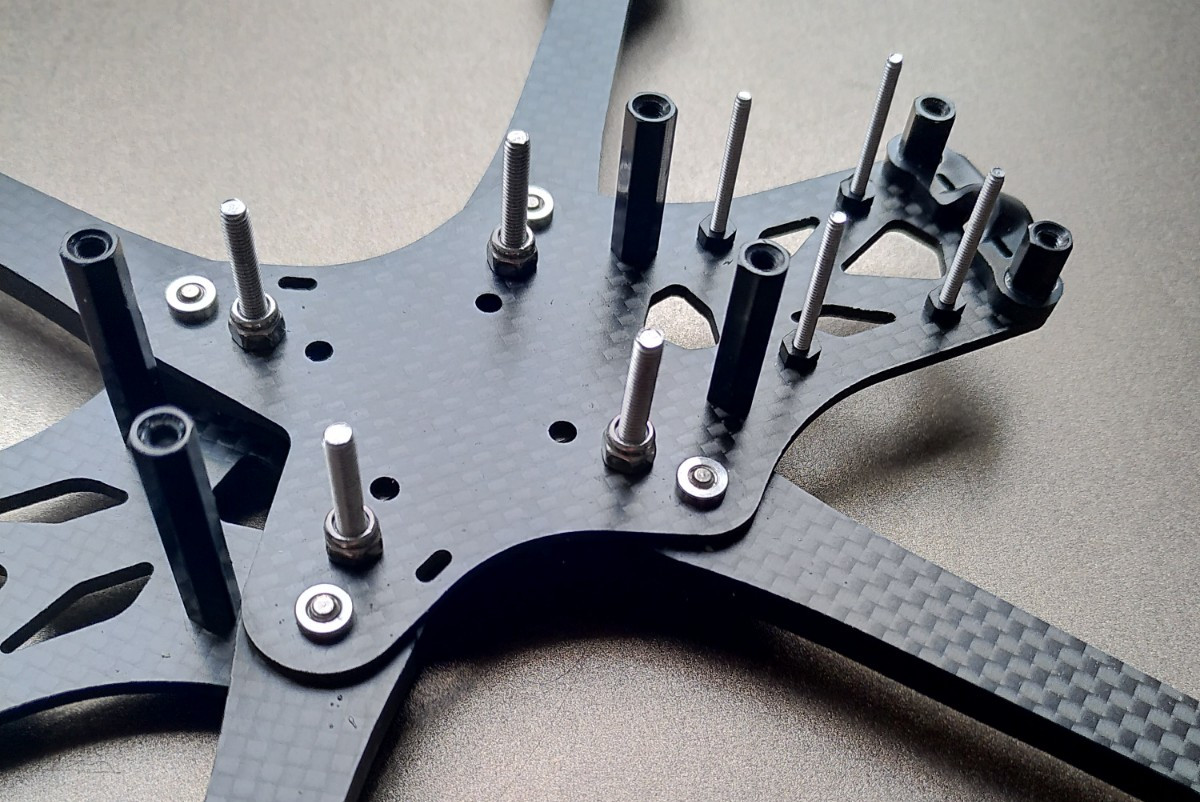
Frame assembly¶
Follow the official ImpulseRC Apex guide to assemble the frame.

Caddx Vista on the 20x20 rear mounting holes¶
Note
You will need 4 long M2 screws that are not provided with the kit. Nuts are the ones provided with the kit.
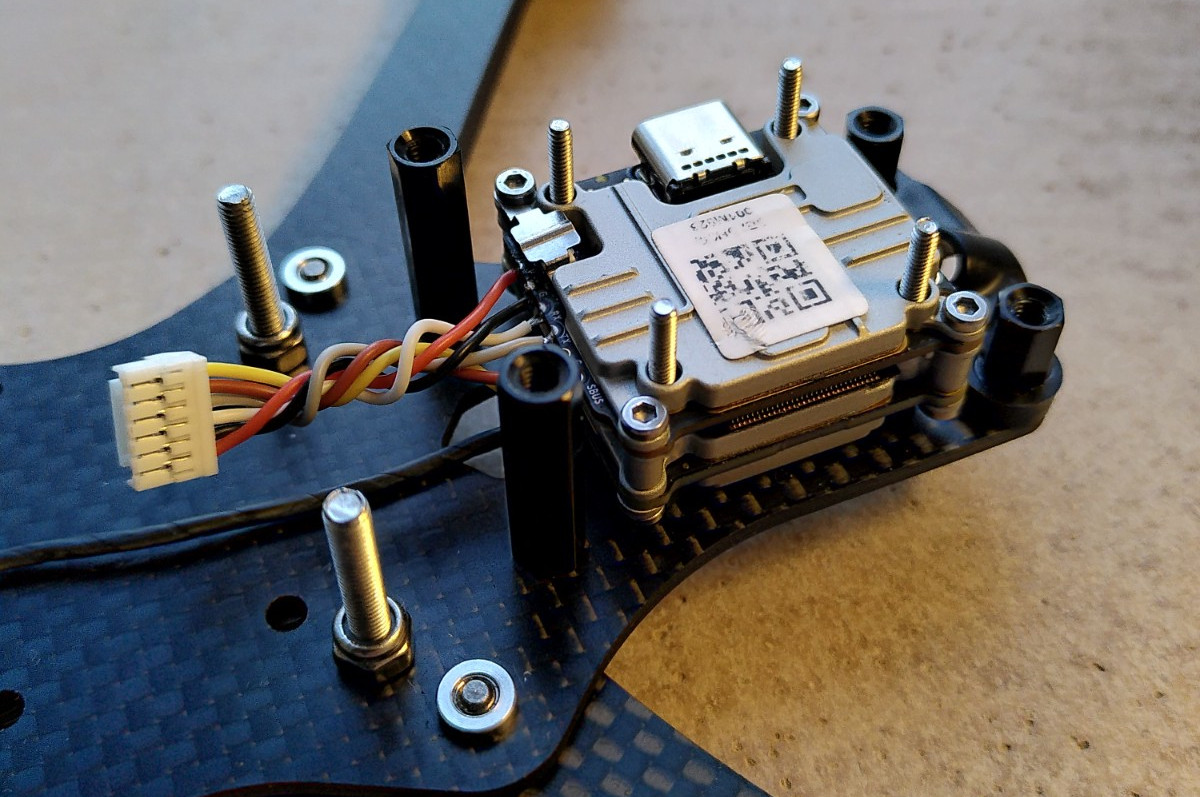
The 20cm cable for Caddx Vista is better protected than the standard one.
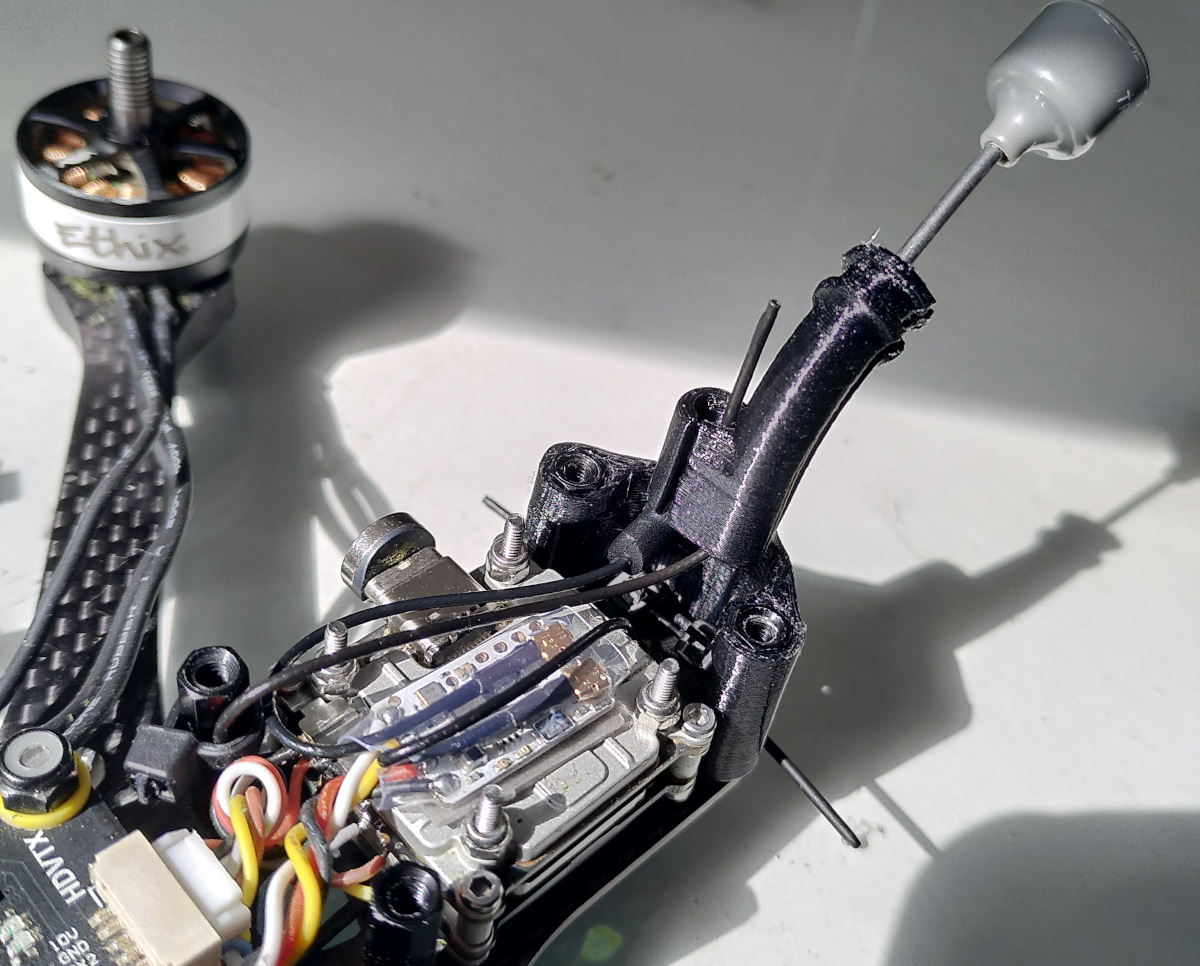
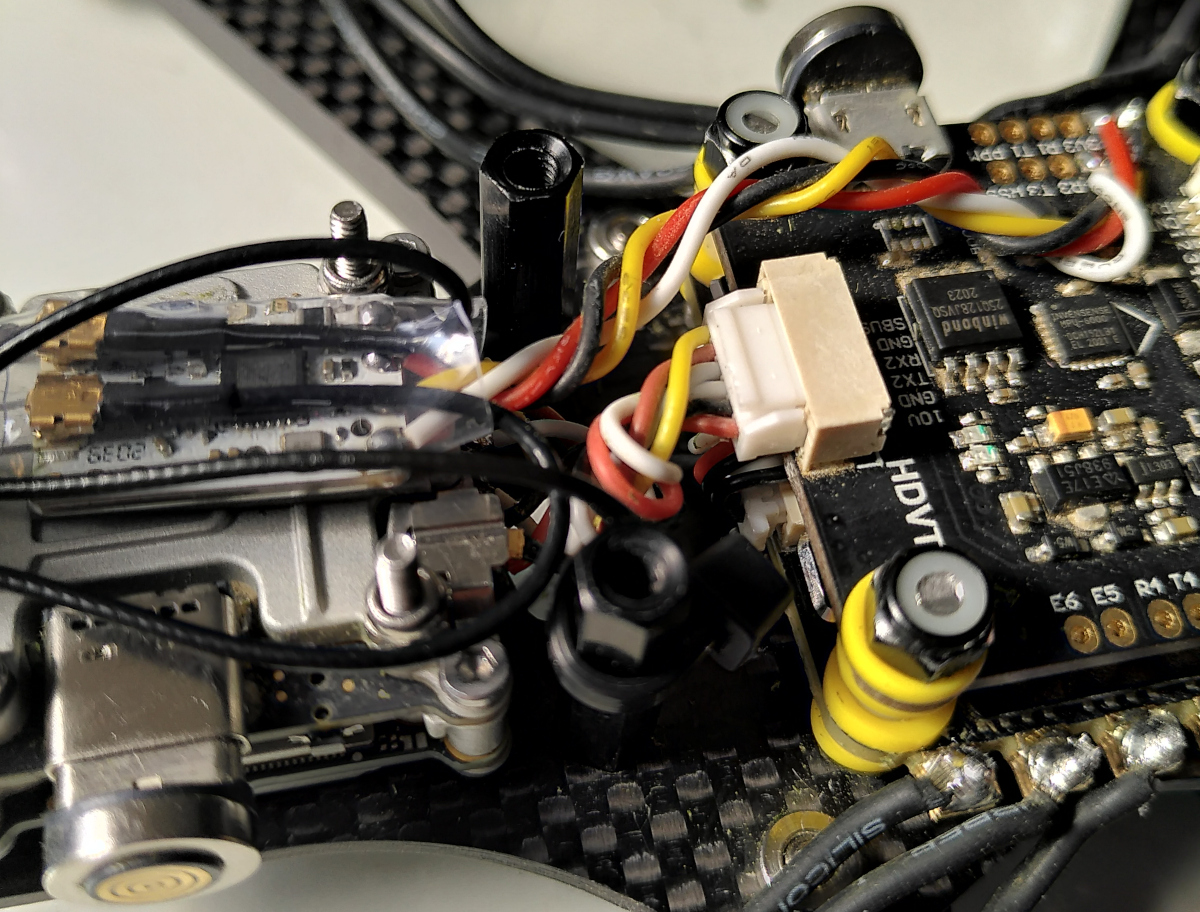
Caddx Vista VTX antenna mounting¶
Use the Apex DJI antenna TPU holder on the rear and make sure to zip tie the U.FL antenna to the standoff.
The Tracer Immortal T antennas fit well: one is zip tied in the lower plate by the provided clamp and the other is sticked in the vertical section of the TPU.
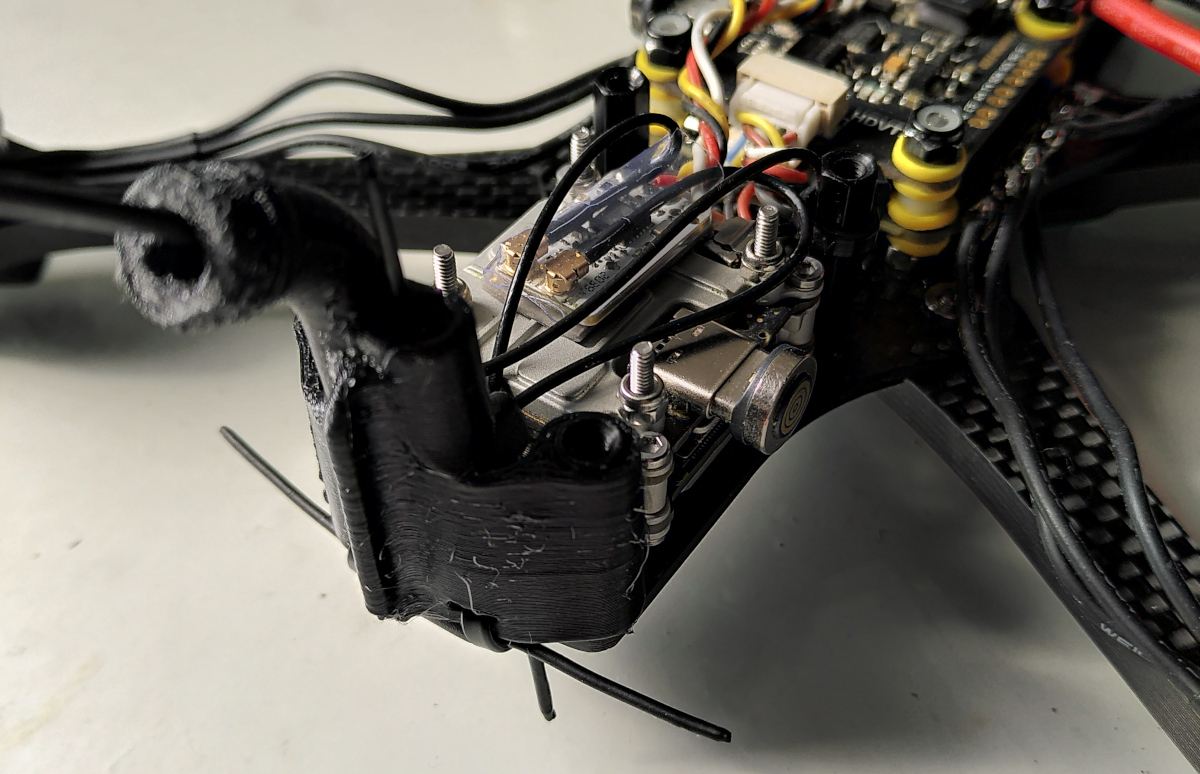
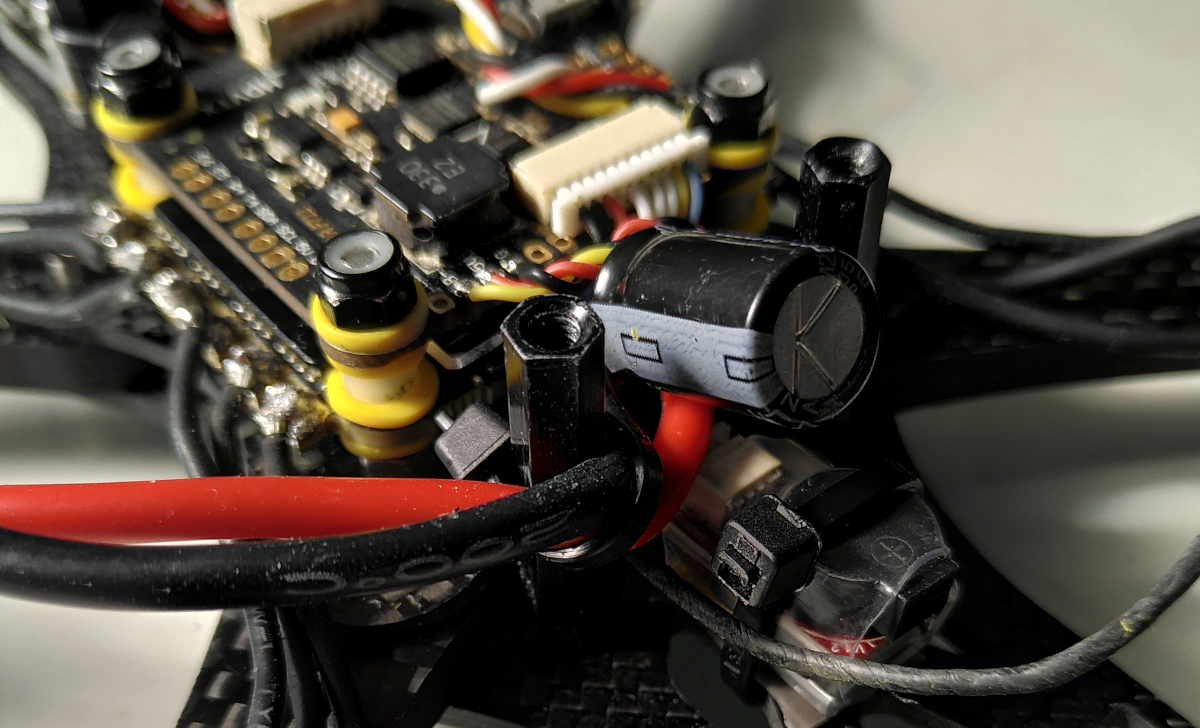
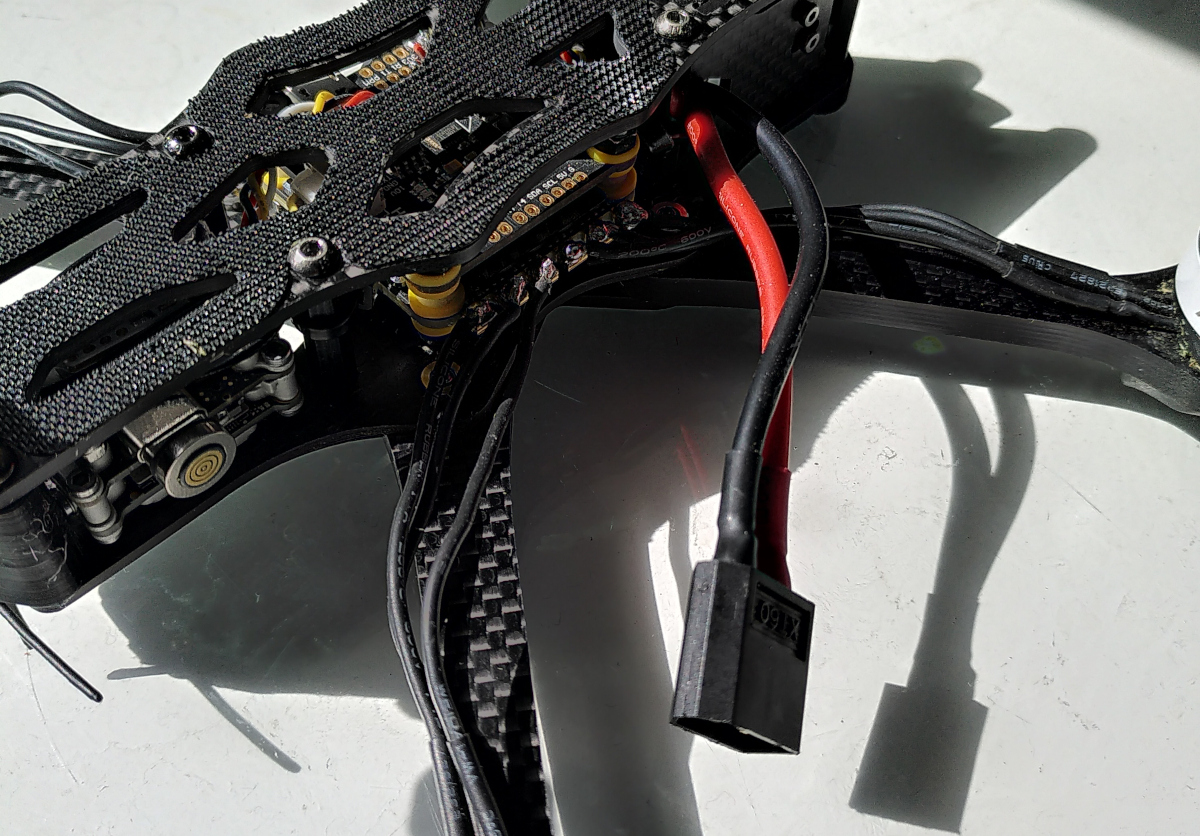
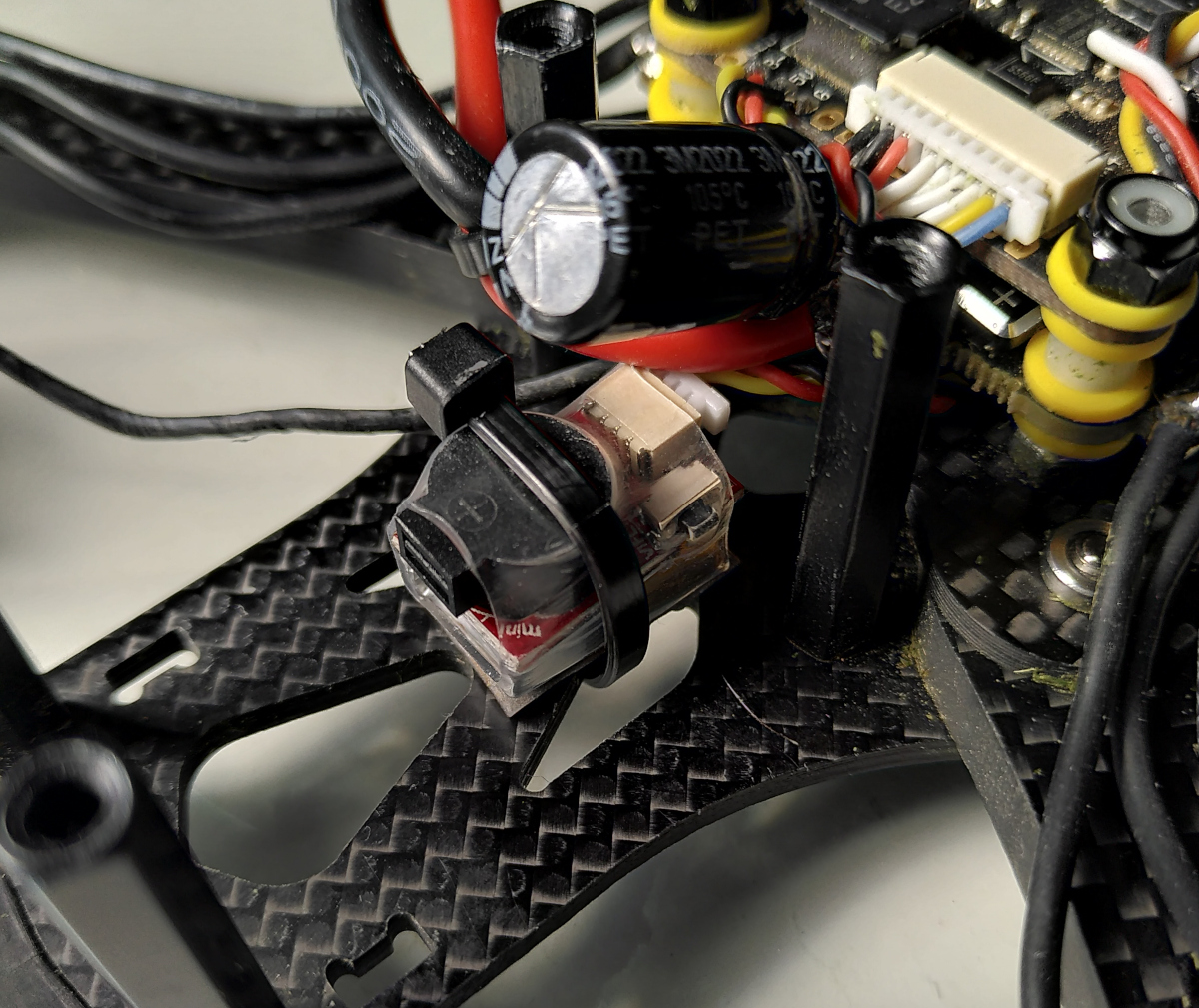
ESC and XT60 mounting¶
In my first version I cut short the XT60 leads but it held the XT60 too close to the motors. Instead I'm now using a 10cm XT60 cable zip tied to the front standoff.
Warning
Be mindful of the fact that the ESC mounted in reverse positionto leverage the space at the front for the capacitor. You will need to reallocate the motor resources on the CLI (see the betaflight section below).
RX wiring¶
Nothing surprising here, wiring the TBS Tracer Nano RX is straightforward!
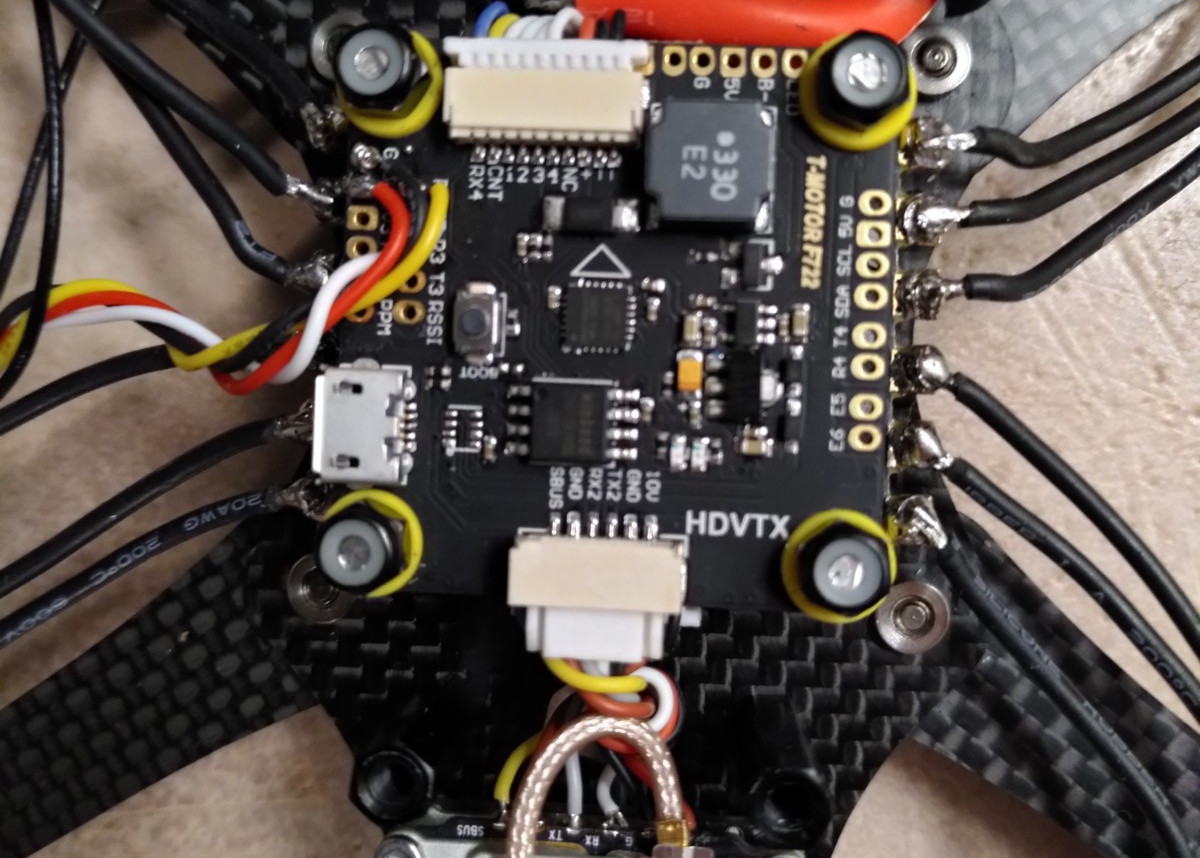
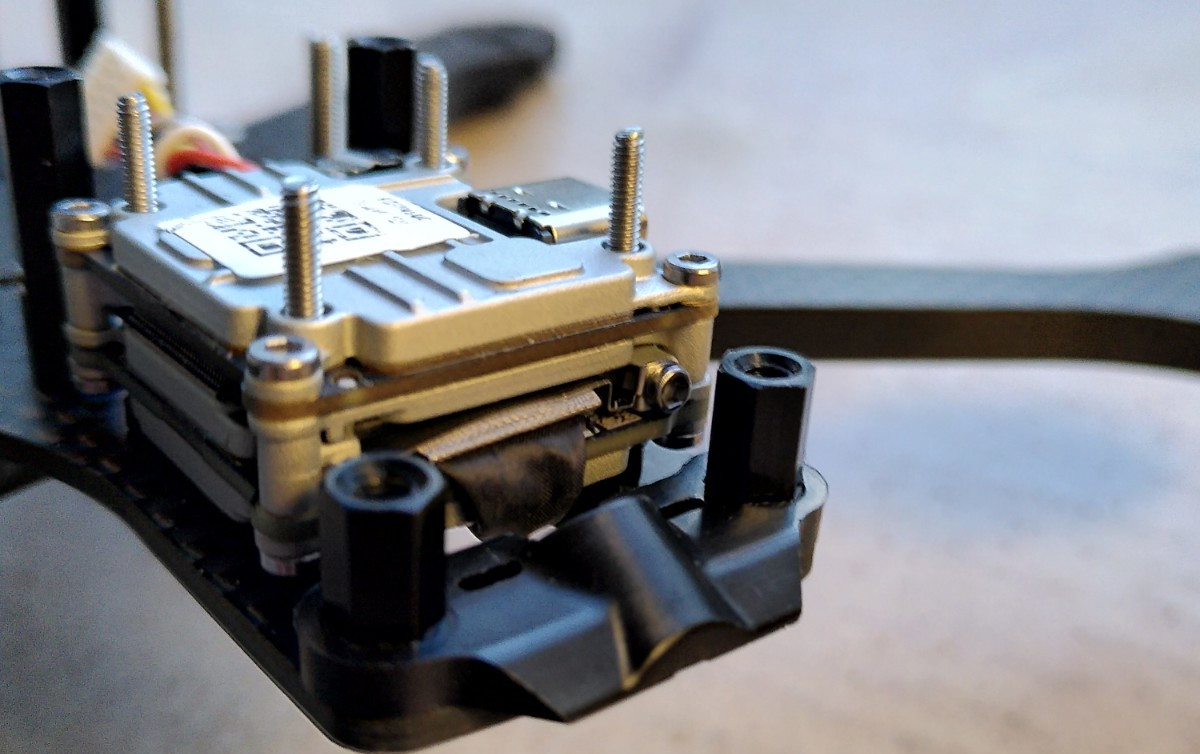
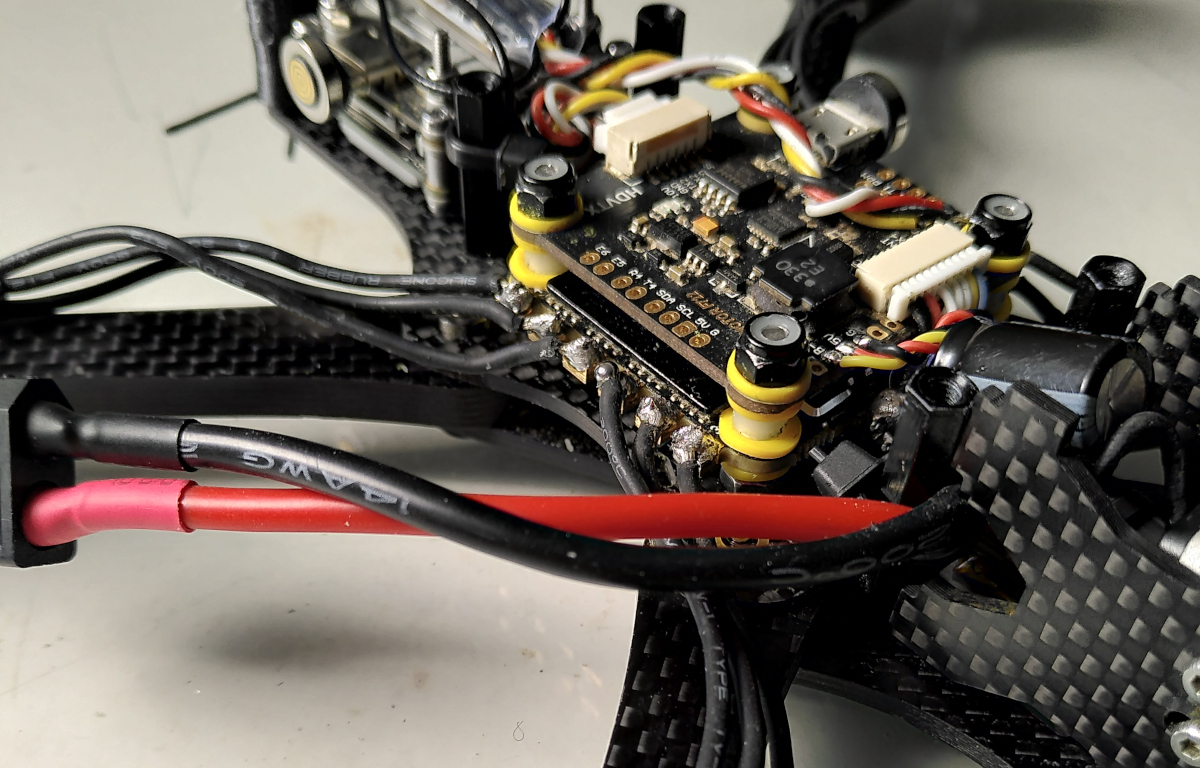
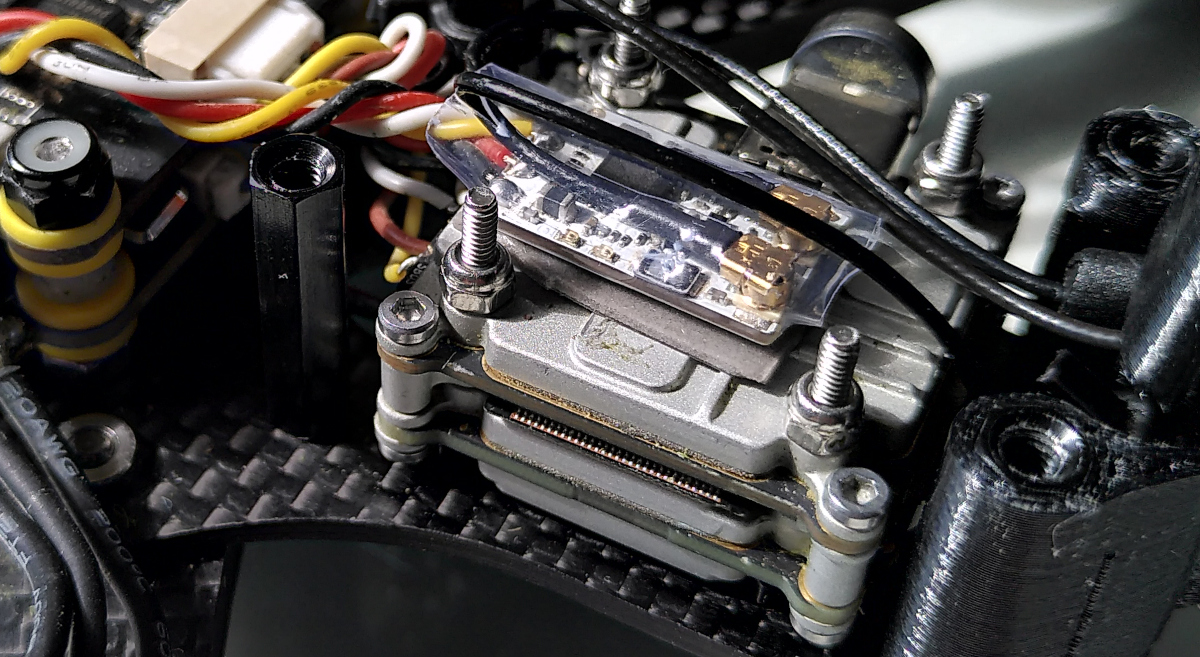
FC mounting¶
Use the longest of the provided FC-to-ESC cables (it connects perfectly, mind the wire direction) and connect the Caddx Vista.
RX placement¶
Once protected, the RX is stuck on top of the Caddx Vista using double sided tape.
Buzzer¶
I chose the Vifly finder mini to get a lightweight yet powerful buzzer that fits perfectly at the front.
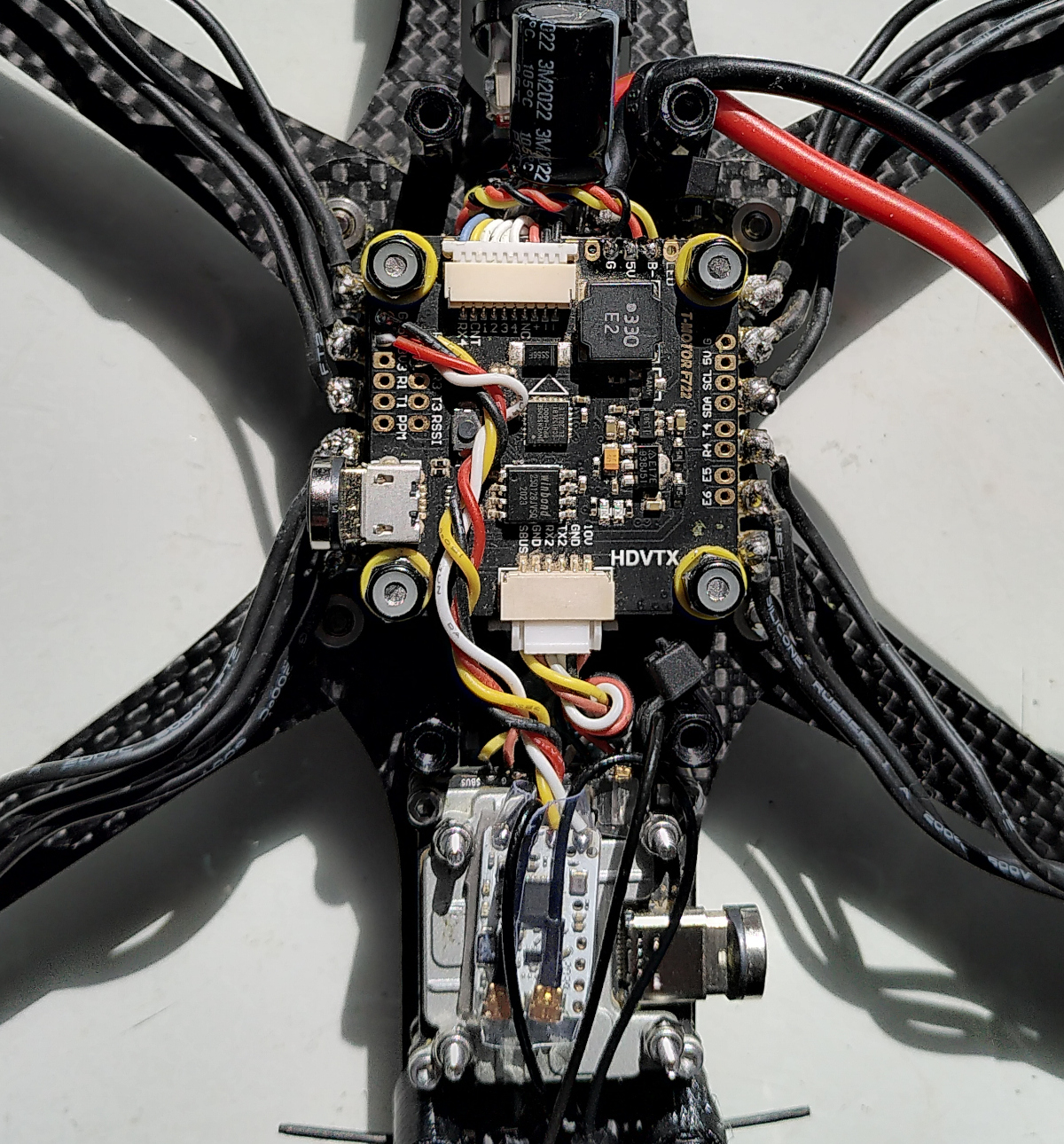
Finishing the build¶
Finish the build by placing the top plate and the plastic provided covers on the arms.


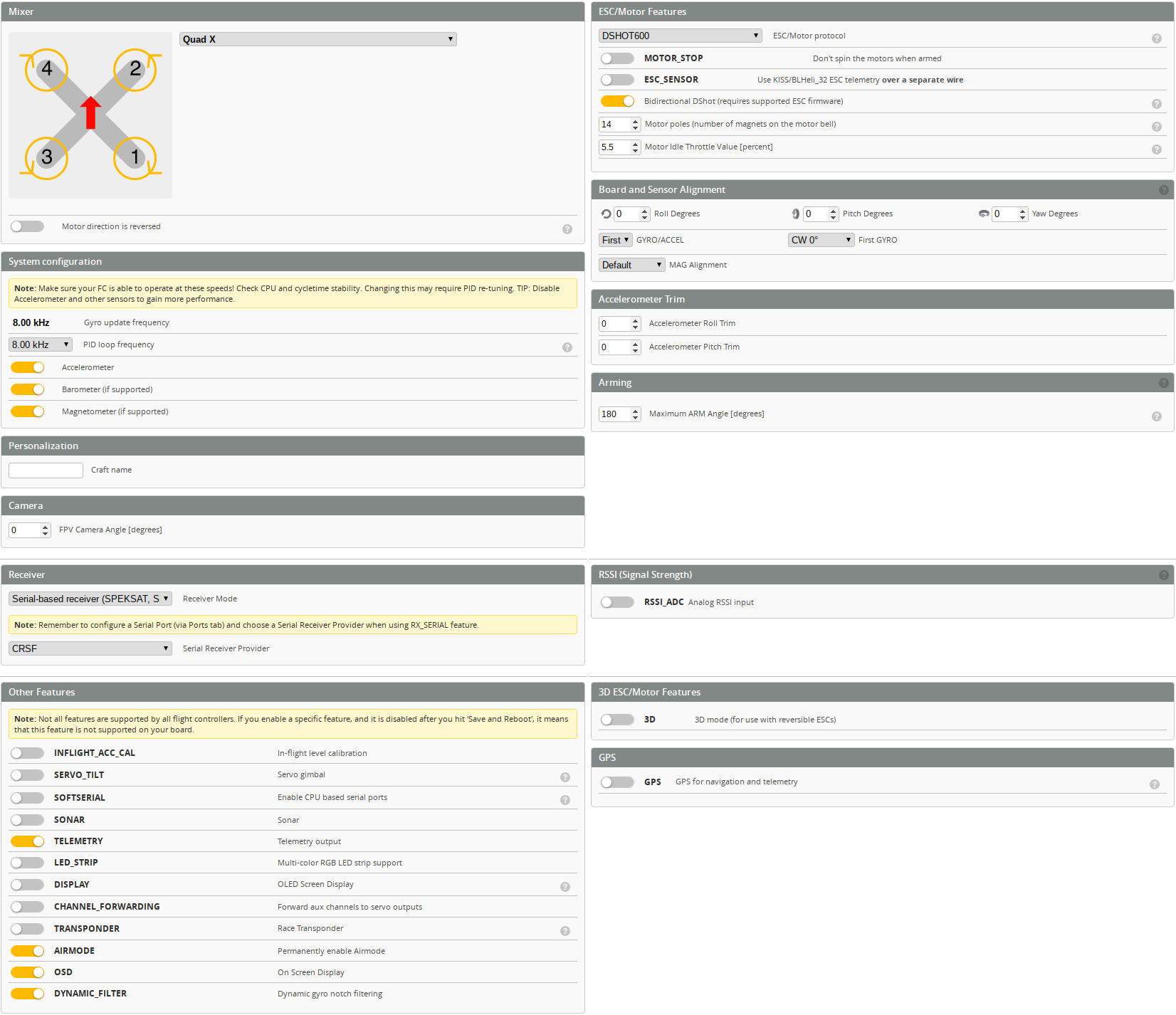
Betaflight configuration¶
- Betaflight target: TMTR/TMOTORF7(STM32F7X2)
Ports:

Bi-directional DShot is enabled and supported natively by the BLHeli32 ESC:
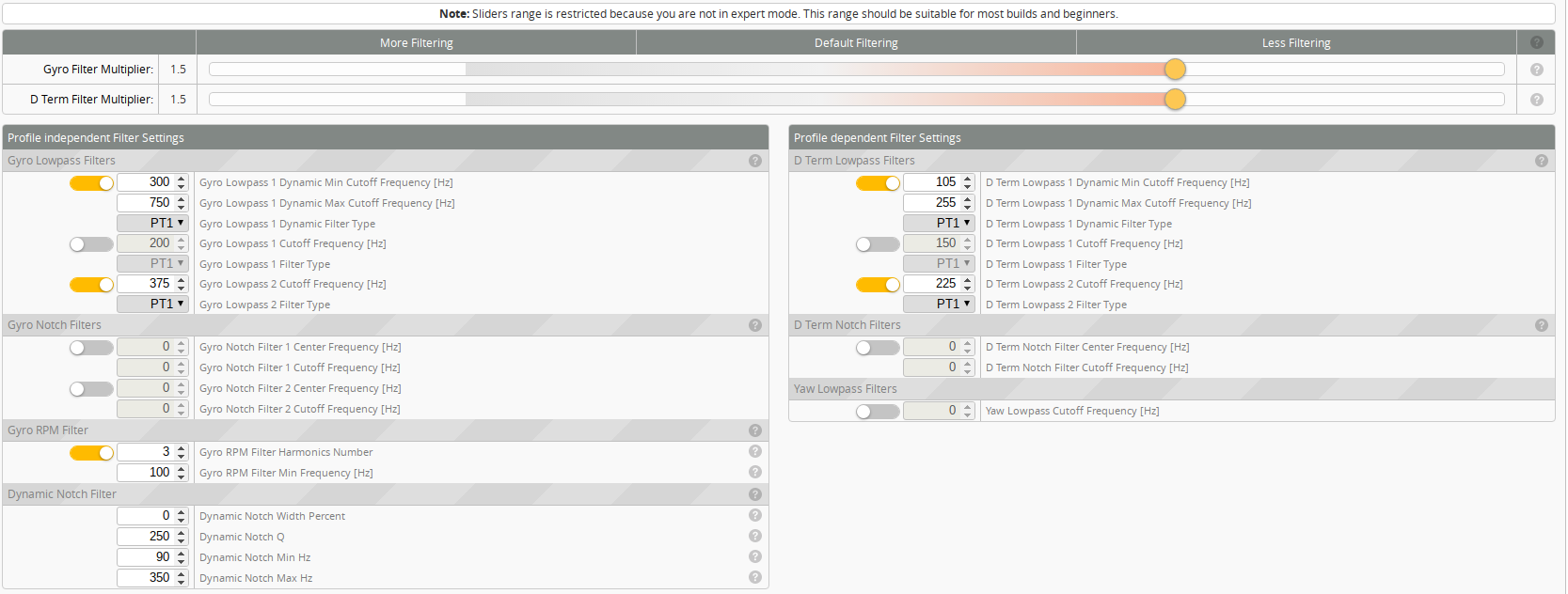
Filter settings to accommodate the bi-directional DShot:
Modes:

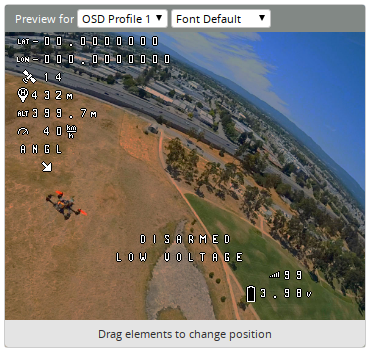
Joshua Bardwell's OSD for DJI FPV Google settings:
Motor resource reallocation¶
Since the ESC is mounted in reverse position, the motors need to be reassigned on the CLI. Depending on your wiring, IDs may change.
# resources
resource MOTOR 1 B01
resource MOTOR 2 B00
resource MOTOR 3 C07
resource MOTOR 4 C06
save
Minimal CLI diff¶
This is the minimal CLI diff that I initially set up without advanced tuning. To get my current tune, see the next section.
#
# Building AutoComplete Cache ... Done!
#
# diff all
# version
# Betaflight / STM32F7X2 (S7X2) 4.2.6 Jan 5 2021 / 19:08:42 (a4b6db1e7) MSP API: 1.43
# config: manufacturer_id: TMTR, board_name: TMOTORF7, version: e02dd6f2, date: 2020-11-04T11:31:26Z
# start the command batch
batch start
# reset configuration to default settings
defaults nosave
board_name TMOTORF7
manufacturer_id TMTR
mcu_id 002f00263338510639393832
signature
# resources
resource MOTOR 1 B01
resource MOTOR 2 B00
resource MOTOR 3 C07
resource MOTOR 4 C06
# feature
feature -RX_PARALLEL_PWM
feature RX_SERIAL
feature TELEMETRY
# beacon
beacon RX_LOST
beacon RX_SET
# serial
serial 1 1 115200 57600 0 115200
serial 4 64 115200 57600 0 115200
# aux
aux 0 0 0 1800 2100 0 0
aux 1 1 2 1300 1700 0 0
aux 2 13 1 1300 2100 0 0
aux 3 35 2 1800 2100 0 0
# rxfail
rxfail 7 s 750
# master
set gyro_lowpass2_hz = 375
set dyn_notch_width_percent = 0
set dyn_notch_q = 250
set dyn_notch_min_hz = 90
set dyn_notch_max_hz = 350
set dyn_lpf_gyro_min_hz = 300
set dyn_lpf_gyro_max_hz = 750
set acc_calibration = 26,3,238,1
set min_check = 1000
set rssi_channel = 8
set serialrx_provider = CRSF
set dshot_bidir = ON
set motor_pwm_protocol = DSHOT600
set small_angle = 180
set osd_warn_rssi = ON
set osd_rssi_alarm = 40
set osd_vbat_pos = 257
set osd_rssi_pos = 2486
set osd_rssi_dbm_pos = 161
set osd_tim_1_pos = 353
set osd_tim_2_pos = 321
set osd_flymode_pos = 2241
set osd_throttle_pos = 313
set osd_vtx_channel_pos = 193
set osd_craft_name_pos = 33
set osd_gps_speed_pos = 161
set osd_gps_lon_pos = 33
set osd_gps_lat_pos = 1
set osd_gps_sats_pos = 65
set osd_home_dir_pos = 2275
set osd_home_dist_pos = 2145
set osd_flight_dist_pos = 184
set osd_altitude_pos = 2177
set osd_warnings_pos = 2441
set osd_avg_cell_voltage_pos = 2516
set osd_disarmed_pos = 2411
set osd_flip_arrow_pos = 65
set osd_core_temp_pos = 248
set osd_log_status_pos = 97
set osd_gps_sats_show_hdop = OFF
profile 0
# profile 0
set dyn_lpf_dterm_min_hz = 105
set dyn_lpf_dterm_max_hz = 255
set dterm_lowpass2_hz = 225
set d_pitch = 32
set d_roll = 30
set d_min_roll = 0
set d_min_pitch = 0
profile 1
profile 2
# restore original profile selection
profile 0
rateprofile 0
rateprofile 1
rateprofile 2
rateprofile 3
rateprofile 4
rateprofile 5
# restore original rateprofile selection
rateprofile 2
# save configuration
save
Tuned CLI diff¶
This CLI diff is updated as my tuning is evolving.
I started off UAV Tech's freestyle presets which I'm modestly trying to improve over time.
#
# Building AutoComplete Cache ... Done!
#
# diff all
# version
# Betaflight / STM32F7X2 (S7X2) 4.2.6 Jan 5 2021 / 19:08:42 (a4b6db1e7) MSP API: 1.43
# config: manufacturer_id: TMTR, board_name: TMOTORF7, version: e02dd6f2, date: 2020-11-04T11:31:26Z
# start the command batch
batch start
# reset configuration to default settings
defaults nosave
board_name TMOTORF7
manufacturer_id TMTR
mcu_id 002f00263338510639393832
signature
# resources
resource MOTOR 1 B01
resource MOTOR 2 B00
resource MOTOR 3 C07
resource MOTOR 4 C06
# feature
feature -RX_PARALLEL_PWM
feature RX_SERIAL
feature TELEMETRY
# serial
serial 1 1 115200 57600 0 115200
serial 4 64 115200 57600 0 115200
# aux
aux 0 0 0 1800 2100 0 0
aux 1 1 2 1300 1700 0 0
aux 2 13 1 1300 2100 0 0
aux 3 35 2 1800 2100 0 0
# rxfail
rxfail 7 s 750
# master
set gyro_lowpass2_hz = 375
set dyn_notch_width_percent = 0
set dyn_notch_q = 250
set dyn_notch_max_hz = 350
set dyn_lpf_gyro_min_hz = 300
set dyn_lpf_gyro_max_hz = 750
set acc_calibration = 26,3,238,1
set min_check = 1000
set rssi_channel = 8
set serialrx_provider = CRSF
set sbus_baud_fast = ON
set dshot_bidir = ON
set motor_pwm_protocol = DSHOT600
set small_angle = 180
set osd_warn_rssi = ON
set osd_rssi_alarm = 40
set osd_vbat_pos = 257
set osd_rssi_pos = 2486
set osd_rssi_dbm_pos = 161
set osd_tim_1_pos = 353
set osd_tim_2_pos = 321
set osd_flymode_pos = 2241
set osd_throttle_pos = 313
set osd_vtx_channel_pos = 193
set osd_craft_name_pos = 33
set osd_gps_speed_pos = 161
set osd_gps_lon_pos = 33
set osd_gps_lat_pos = 1
set osd_gps_sats_pos = 65
set osd_home_dir_pos = 227
set osd_home_dist_pos = 97
set osd_flight_dist_pos = 184
set osd_altitude_pos = 129
set osd_warnings_pos = 2441
set osd_avg_cell_voltage_pos = 2516
set osd_disarmed_pos = 2411
set osd_flip_arrow_pos = 65
set osd_core_temp_pos = 248
set osd_log_status_pos = 97
set osd_gps_sats_show_hdop = OFF
set gyro_rpm_notch_harmonics = 2
profile 0
# profile 0
set dyn_lpf_dterm_min_hz = 105
set dyn_lpf_dterm_max_hz = 255
set dterm_lowpass2_hz = 225
set pidsum_limit = 1000
set pidsum_limit_yaw = 1000
set p_pitch = 69
set d_pitch = 44
set f_pitch = 171
set p_roll = 63
set d_roll = 40
set f_roll = 162
set p_yaw = 68
set f_yaw = 162
set d_min_roll = 0
set d_min_pitch = 0
profile 1
profile 2
# restore original profile selection
profile 0
rateprofile 0
rateprofile 1
rateprofile 2
# rateprofile 2
set rates_type = ACTUAL
set roll_rc_rate = 1
set pitch_rc_rate = 1
set yaw_rc_rate = 1
set roll_expo = 54
set pitch_expo = 54
set yaw_expo = 54
set roll_srate = 100
set pitch_srate = 100
set tpa_breakpoint = 1750
rateprofile 3
rateprofile 4
rateprofile 5
# restore original rateprofile selection
rateprofile 2
# save configuration
save